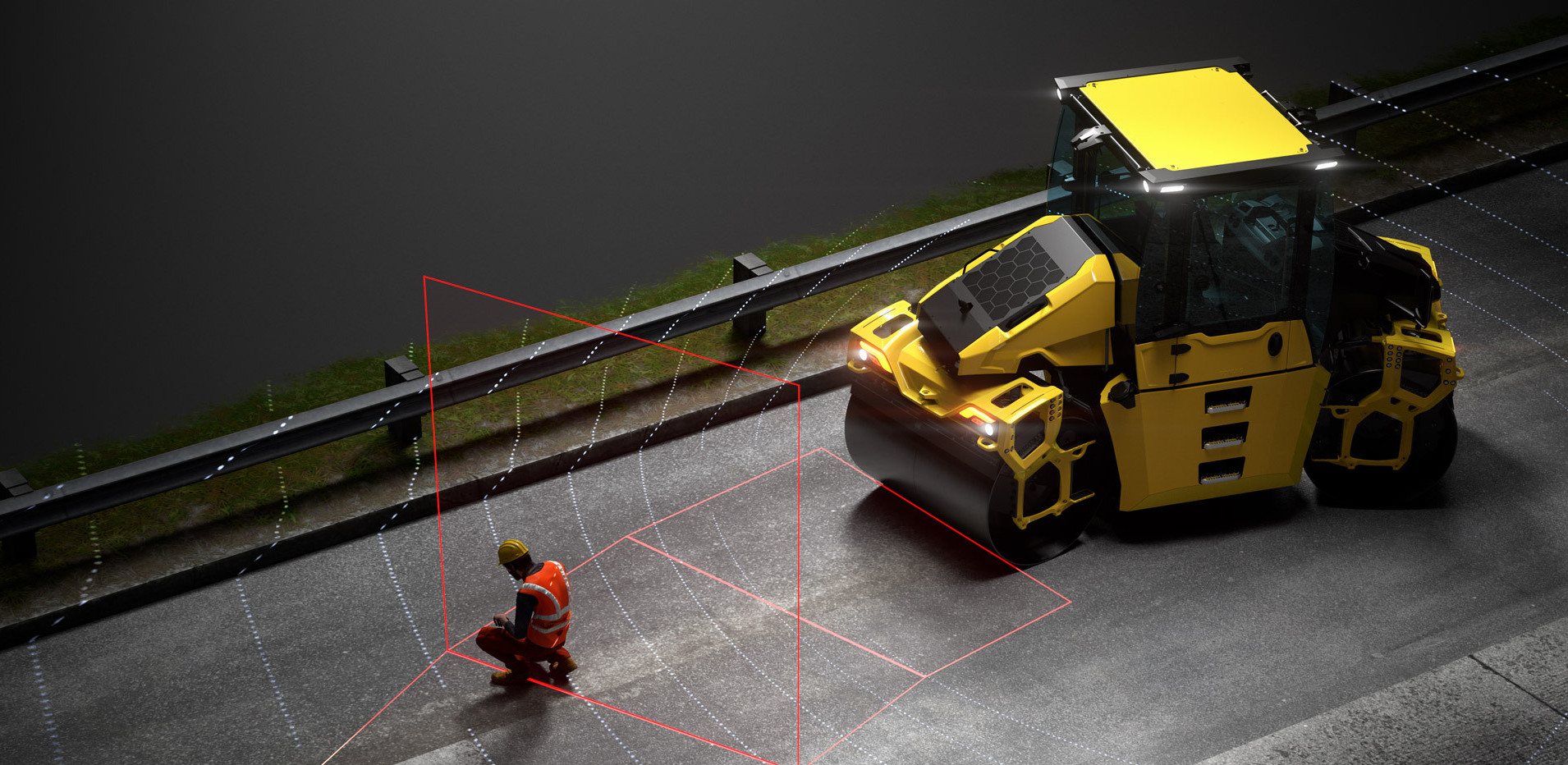
L’assistance est pertinente sur des chantiers où les risques de collisions sont élevés, en particulier dans des environnements à visibilité réduite ou lors de manœuvres complexes. Le système repose sur un ensemble de capteurs LiDAR de dernière génération. Ces capteurs 3D, capables de scanner l’environnement de la machine grâce à des centaines de milliers de mesures de distance par seconde, fournissent des données précises pour la détection d’objets et l’évitement des collisions. Le capteur mesure la distance par laser infrarouge, ce qui est particulièrement utile lorsque la visibilité est réduite. La portée des capteurs est d’environ 12 m. Non seulement l’AFU détecte des obstacles sur la trajectoire immédiate de la machine mais il anticipe également la trajectoire future de la machine en considérant des éléments comme le braquage des billes. Cette anticipation proactive prévient les situations dangereuses avant qu’elles ne surviennent. Si un obstacle est détecté sur la trajectoire de la machine, l’opérateur en est averti par une alerte visuelle et sonore. En l’absence de réaction, le système freine automatiquement la machine, et ce jusqu’à un arrêt complet si nécessaire. En cas de survenance d’un obstacle soudain, la machine applique un freinage immédiat.
Personnalisation
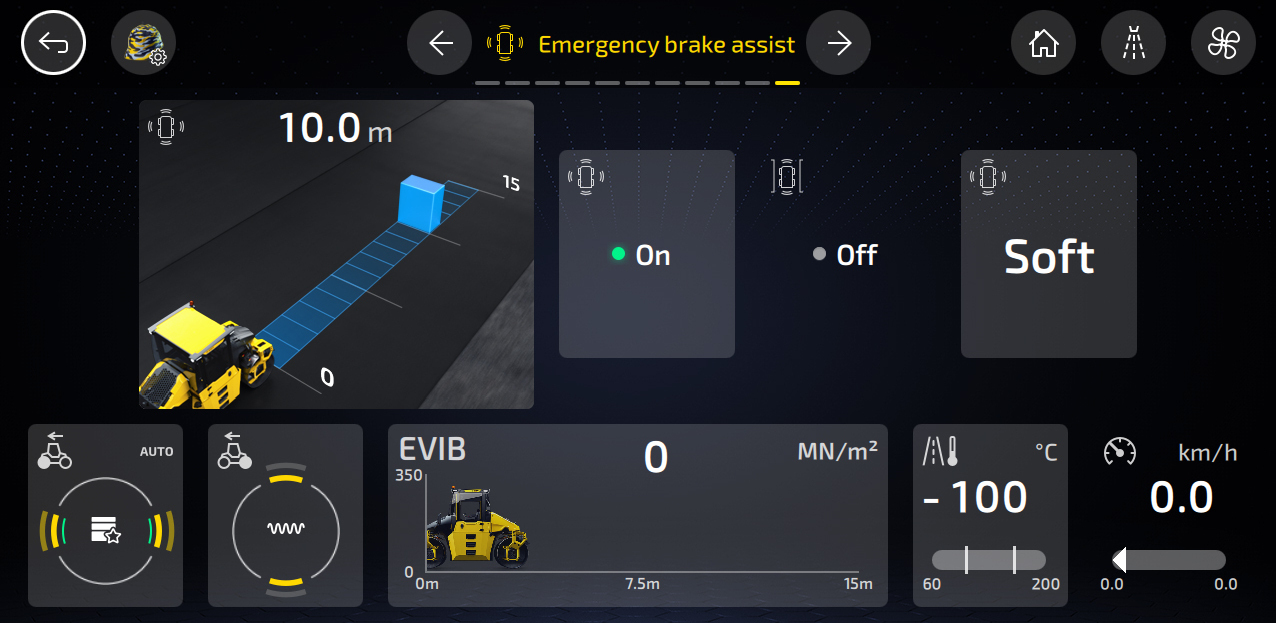
L’AFU est conçu pour filtrer les fausses alertes liées à des éléments comme les insectes, les flocons de neige ou encore les obstacles de faible hauteur, ce qui réduit les interruptions inutiles du processus de travail. Trois niveaux de puissance de freinage permettent d’ajuster l’intensité du freinage selon des besoins. Un mode de travail « rasant » permet de travailler près d’obstacles latéraux. La fonction de freinage automatique peut être momentanément désactivée.
Intégration
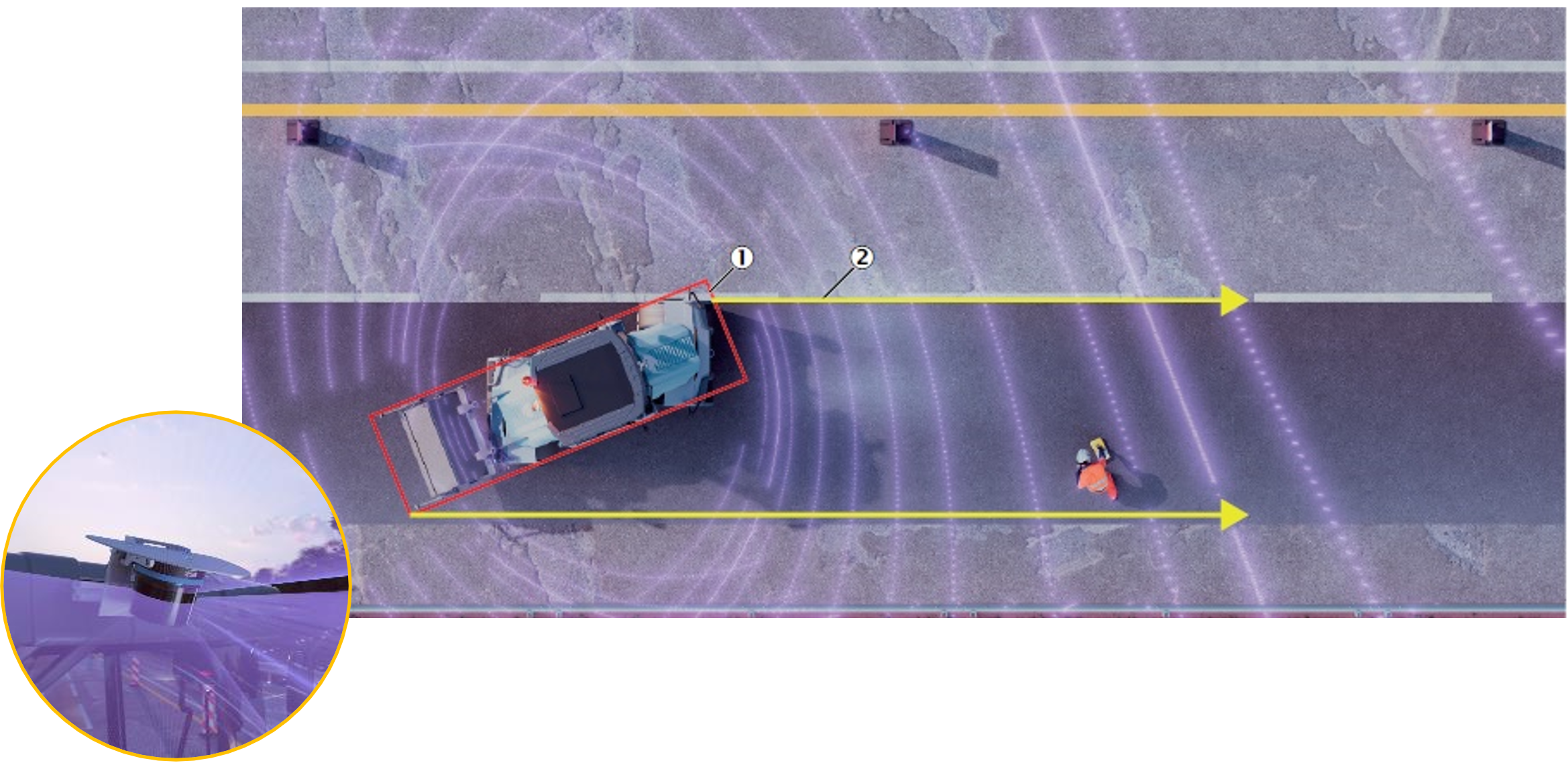
L’intégration du système dans l’architecture de la machine garantit une compatibilité et une efficacité maximales. En plus de détecter les obstacles sur la trajectoire, le système prend en compte l’angle de braquage, la vitesse de déplacement et la position du levier de translation. Seuls les obstacles situés directement sur la trajectoire de la machine sont pris en compte pour concentrer les actions du système sur les risques réels. Le jury a été convaincu par cet outil essentiel pour la sécurité sur le chantier. En anticipant les risques de collision et en réagissant de manière proactive, il permet non seulement de protéger les travailleurs et les autres matériels mais aussi de minimiser les risques de dommages sur les surfaces sensibles, comme les enrobés chauds.
Le jury a aimé
- La filtration des fausses alertes
- L’intégration en usine